
Icing is a major problem in the operation of wind turbines, as it leads to massive yield losses, wear and tear and also endangers people in the vicinity of the turbines. Structural measures for de-icing, such as integrated heating systems in the rotor blades or de-icing operations by industrial climbers or helicopters, are very costly. For this reason, the TURBO project explored the application of temporary anti-icing protection using a drone. The aim of the project was to develop the basic technology building blocks (coating material, application technology, drone platform) for coating rotor blade leading edges with a temporary ice protection system. In addition, the technology building blocks were to be integrated into one system and the feasibility was to be demonstrated by outdoor coating tests on rotor blade sections.
Drone application technology poses a challenge
For the inspection of large structures such as bridges or high-rise buildings, drones have been used for several years. These can detect corrosion or erosion damage, for example, at low cost. It would therefore be obvious to also carry out the painting work of such surfaces by drone. Here, however, one has to deal with enormous challenges, such as the weight of coating aggregates and materials, rotor downdrafts, external wind or other environmental conditions. For the entry into drone application technology, therefore, the project did not choose a high-quality paint application, but rather the use case of temporary icing protection. In addition to this specific application purpose, the foundations were also laid for mobile coating equipment in other applications such as the coating of rail vehicles, aircraft and facades.
Investigation of the interaction between material properties, application technology and drone flight
This work focused on investigating the interactions of robust application technology (e.g., weight, mechanism), material properties (e.g., environmental compatibility, viscosity, anti-ice function), and drone flight (e.g., stability, positional accuracy, rotor downwind).
Application method:
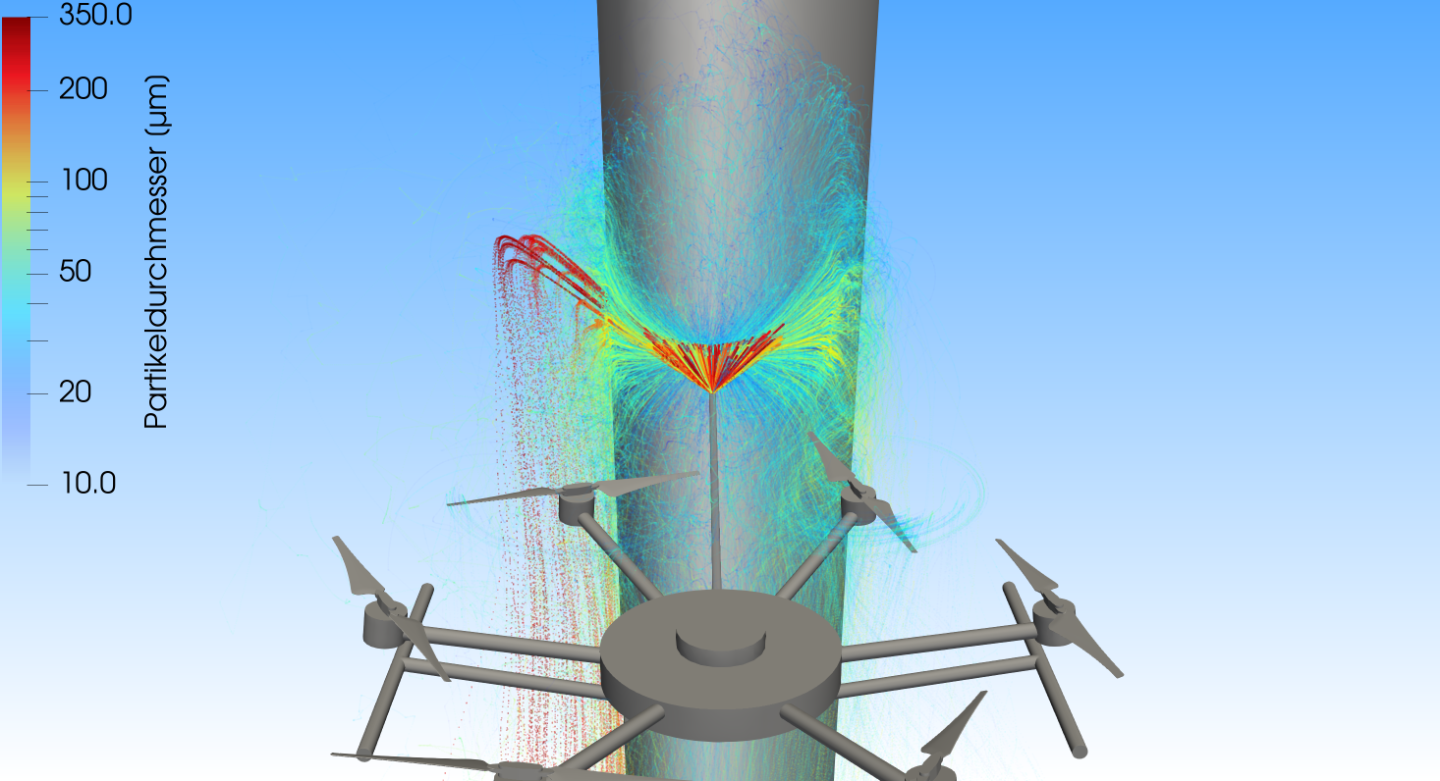
In order to create conditions that are as real as possible, at the beginning of the project at Fraunhofer IPA, Dr. Oliver Tiedje's team used simulations (Figure 1) to recreate the conditions at a wind turbine. In particular, the typical wind conditions were taken into account. As a result, the droplet sizes, velocities and the coating distance at which the losses of coating material are kept within limits were determined. Airless atomization was found to be the best non-contact application method. Further development steps included pressure generation, i.e. designing the pump so that it can process the material and is as light as possible, and applying the coating with a lance so that the spray jet is not affected by the rotor downdraft of the drone.
The coating system:
In parallel with the investigation of the appropriate application technique, a temporary coating system was developed at Fraunhofer IFAM to protect against icing. This system consists entirely of biologically harmless raw materials, is suitable for the application technique in terms of viscosity, and allows the coating to remain ice-free for as long as possible. The developed coating material can be applied quickly and easily by spray application and dries quickly at room temperature. Functional tests in the ice chamber at Fraunhofer IFAM showed that the coating prevents frost formation as expected.
Drone technology:
Initial drone operational tests and integration analyses on the flight units have already been conducted in the field. In different flight tests, the positioning accuracy and resulting center of gravity positions including the resulting change in flight performance of different drones were determined. The aim was to realize a simple controllability of the application device by the pilot, as well as the integration of the application device incl. material container on a commercial drone. The tests showed that especially the positioning accuracy in combination with the spray cone stability (even in light wind) are of particular challenge if the spray application is to be carried out in horizontal direction and in a controlled manner. Without the use of higher-quality positioning systems such as RTK, the unmanned aerial vehicle moves in hovering flight (i.e. without control inputs from the pilot) by up to approx. ±40cm in lateral direction. Similar values were obtained for the height stability. With RTK, this movement could be reduced to approx. ± 5cm in all three spatial directions. Furthermore, a stable and at the same time light integration of the lance was an important aspect. In this case, the power supply was realized by a separate battery for the spraying system. The spray cone was activated by a simple toggle switch on the remote control. An alternative solution was investigated by "tethering" the drone, where the pump unit remains on the ground and the drone is supplied with the application medium by a hose. The main advantages here are the higher capacity and the possibility of also supplying power from the ground. However, a correspondingly high payload of the drone for carrying the hose, especially at higher altitudes, is to be regarded as a further challenge.
The overall system, consisting of drone, application unit (including paint supply) and coating system, was successfully demonstrated on a model of a rotor blade section. Both a free-flying demonstrator (Figure 2) and a drone in which the coating material was supplied by hose from the ground were successfully tested.
Project partners
- Fraunhofer Institute for Manufacturing Technology and Advanced Materials IFAM
- Fraunhofer Institute for Manufacturing Engineering and Automation IPA
The project was also supported by 19 companies from the fields of paint and raw material manufacturers, manufacturers of painting equipment, drones, and operators of wind turbines.
Project duration
01.03.2021 until 31.08.2023
